ロボットの性能向上を目的としたモータ開発
研究者:八田 禎之
キーワード
多自由度モータ、モーションコントロール、ロボット

モータ開発だけでなく、遠隔操作ロボットやそのロボットを使用した熟練者技術解析も行っています。
最近の研究テーマ
✦ 磁気ねじ型二自由度モータ開発
✦ バイラテラル制御における通信遅延補償
✦ バイラテラルシステムを用いたヘラ絞り動作の解析
✦ 磁気ギアードスクリュー構造に基づいた二自由度モータ開発
研究概要
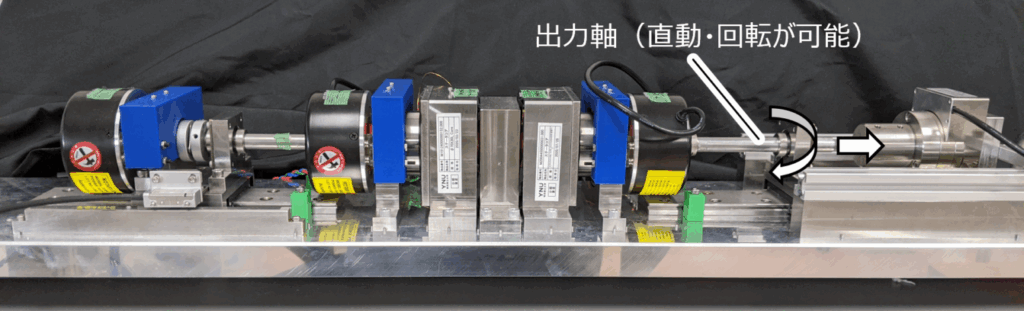
ロボットは現代社会を支える重要な技術の一つとして需要がますます増加しており、その技術開発は日々行われています。一般的にロボットは一個の関節に一台のモータが設置されています。複雑な動作を行うためにはモータの台数を増やす必要があり、ロボット自体のサイズ及び重量が増加する課題があります。これを解決するために一台で複数台分のモータの動作を実現する多自由度モータの研究を行っています。多自由度モータの一つとして、磁気ねじ型二自由度モータの開発を行いました。本モータは一台で回転モータ及び直動モータの動作を同時に実現可能であるとともに磁気ねじ構造により大きな推力を発生可能です。
産業界へのアピールポイント
- 磁気ねじ型二自由度モータの適用により、ロボットの小型化軽量化のみならず、磁気ねじ構造という摩擦レスのトランスミッションによる低損失・低炭素化
- ロボットのみならず様々な装置に合わせてモータを開発することにより、装置の小型化・軽量化・高機能化が可能モータ開発だけでなく、モータ制御設計も行い、ハードからソフトまでを一括で開発
実用化例・活用例
- スカラーロボット
- ロボット用エンドエフェクタ