匠の技を備えたロボットの実現に向けて 〜高精度力制御〜
研究者:伊藤 和晃
キーワード
産業用ロボット、匠の技、高精度加工、穴あけ、バリ取り

高度なものづくりを支える「匠の技」の自動化や後継者への技術伝承に使えるモーションコントロール技術を開発しています。
最近の研究テーマ
✦ 高精度加工のための力制御型エンドエフェクタの開発
✦ パラレルリンクロボットによる位置と力のハイブリッド制御に関する研究
✦ 不織布製造工程におけるリアルタイム異物検出
✦ 反力推定オブザーバによる多目的コンプライアンスユニットの力制御に関する研究
研究概要
ロボットは溶接作業や搬送など位置決めを主体とする用途に多く用いられています。
当研究室では「匠の技」と呼ばれる高度作業のロボット化実現を目指し、繊細な力加減ができるロボットとエンドエフェクタの研究開発を行っています。
匠の技を再現するためには、視覚と力触覚に基づいて、環境理解・物体把握・物体操作の一連動作を高精度に実現すること、つまり大脳的・小脳的・脊髄的処理の組み合わせが重要となります。
○ 大脳的(理解・予測・計画・意思決定)
⇒ 人工知能
○ 小脳的(学習による調整・誤差修正)
⇒ 学習的最適化
○ 脊髄的(反射・即応制御)
⇒ 数理的手法・制御理論
【数理的手法の応用(高精度力制御)】
○ 反力推定オブザーバによる高精度力計測
○ 高精度モデリングと二自由度制御による高精度な位置制御および力制御
産業界へのアピールポイント
-
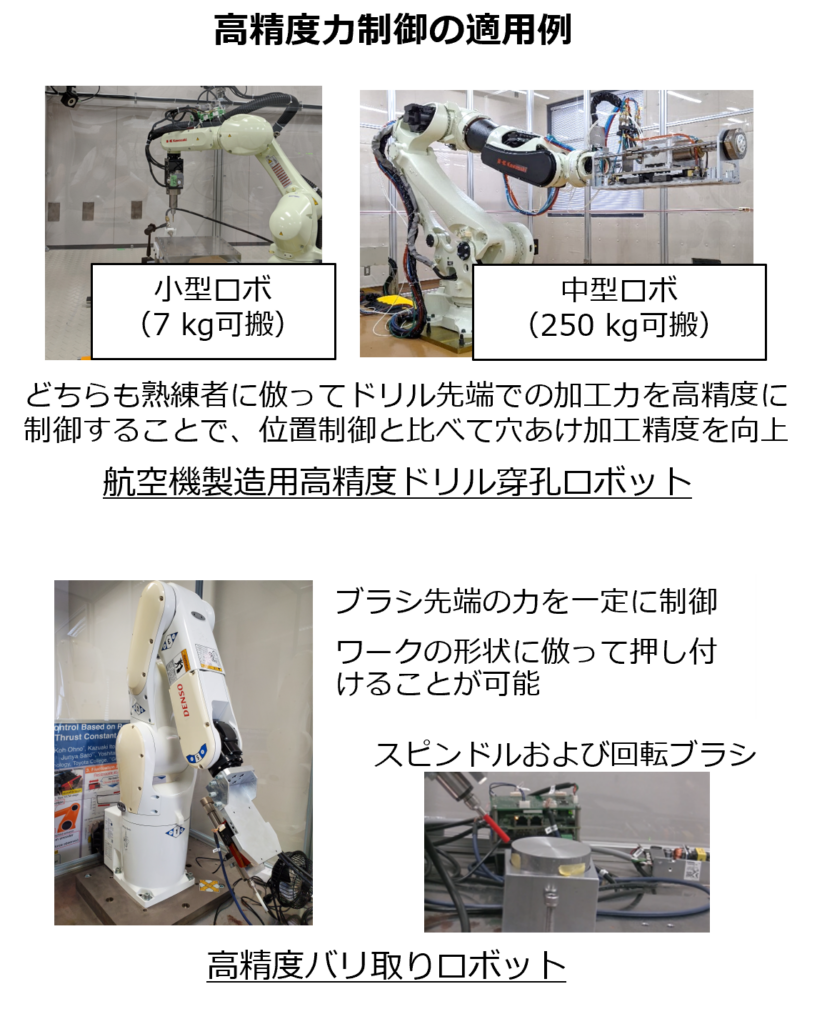
航空機部品のドリル穿孔、曲面が多い複雑形状部品のバリ取りなど、高精度加工を必要とする工程の自動化
-
労働力不測の解消
-
加工品質の向上と均一化、トレーサビリティの向上
実用化例・活用例
- 高精度ドリル穿孔ロボット
- 高精度バリ取りロボット
- ロボット用多目的コンプライアンスユニット